Aevena Indoor Flying Robot - VR Simulator
Role:
Product Manager & UX Designer
Medium:
Virtual Reality, UNITY 3D, HTC Vive
The purpose of this project was to create the user experience of what it would be like to have a flying robot in the home and what it would be like to interact with it. This simulator allowed us to troubleshoot and test the robot's movements, sounds and controls before building the actual hardware. We created a web interface that allowed us to set the colors and sequencing of the lights that would be built into the drone so that we could create the audio and visuals for when the robot needed to communicate. We were also able to test and discover things like the optimal altitude, flight speed and photo distance to make the user experience as pleasant as possible.
This video is a walk through of the set up procedure for when a person first uses the product and what it would be like to control the robot using your phone.
I managed the product design as well as production, directing the engineering team, art team, robotic movement/flight behavior, CMS production, sound and lighting design, voice, and mobile app design.
The VR simulator allowed us to get a good sense of how the final real-world product would work while the hardware team was working on the mechanical and physical production. This way we could test things in parallel and have decisions made before programming the behavior into the actual robot. This allowed us to iterate and do a lot of trial and error in a fast, cost-effective way which would have been extremely cumbersome iterating with the physical components building a new version for every variable. We were also able to experiment with different industrial designs digitally from CAD and specs vs getting each concept built.
This video is a collage of the actual drone development running in parallel.
At 1:10 you can see the final designs start to be used
At 1:25 you can see the fully functioning robot, demoing it's ability to take off, fly and be moved to a different location, then find the dock and land itself again.
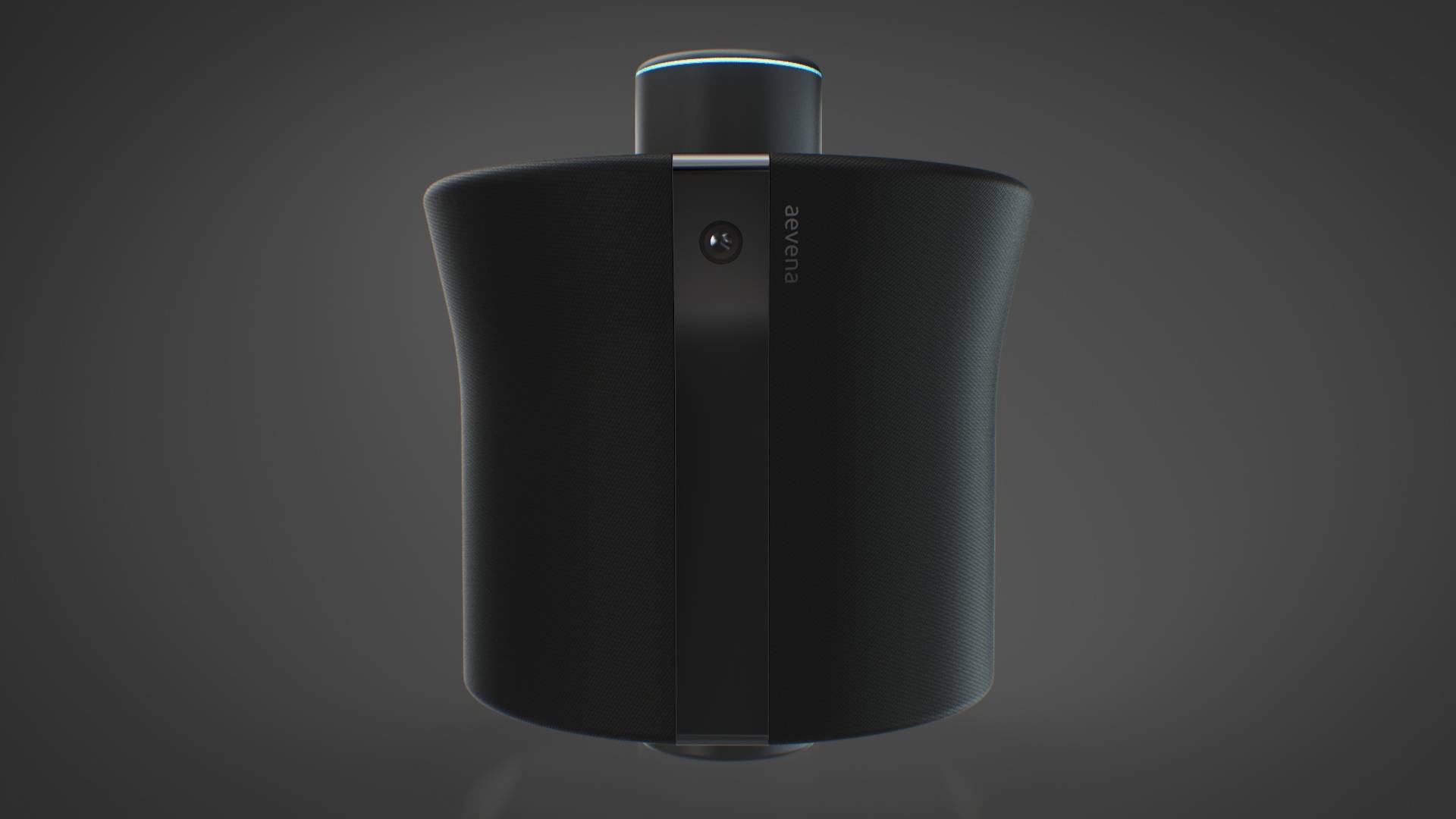
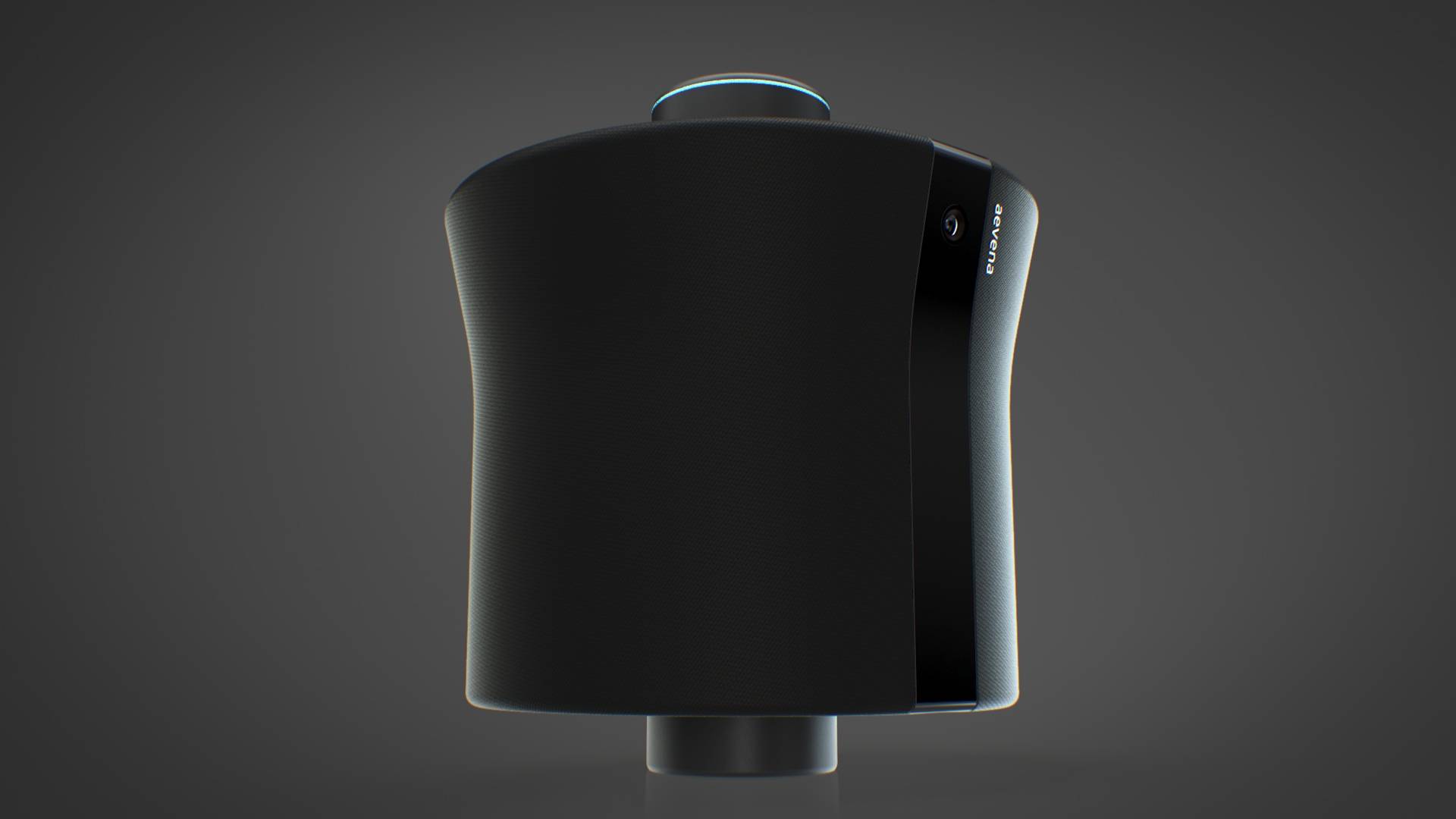
The gallery below shows the final design that we decided on after trying the different industrial designs in the simulator. These images were then created from the CAD and material specs that was used to manufacture the actual robot that is seen demoed in the second video above. The image gallery highlights the final design created by our 3D graphics team for promotional images for our website and other materials.














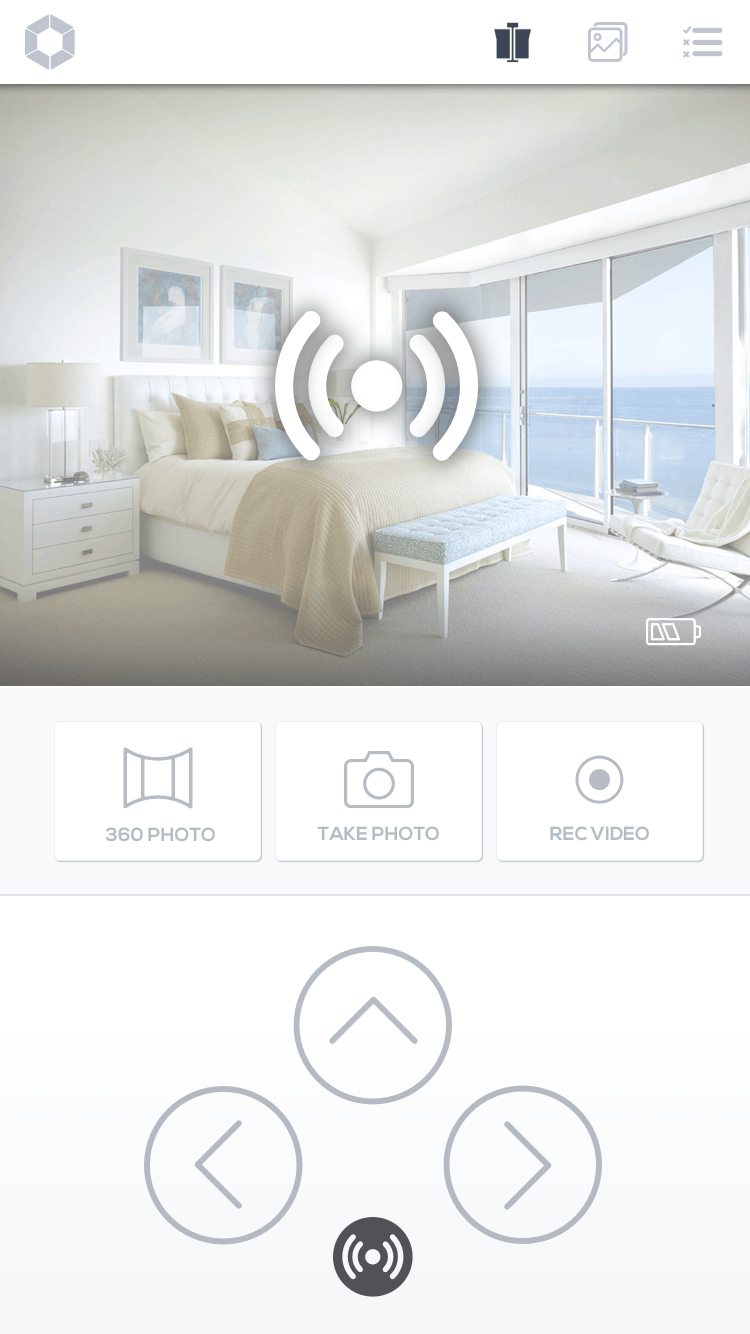
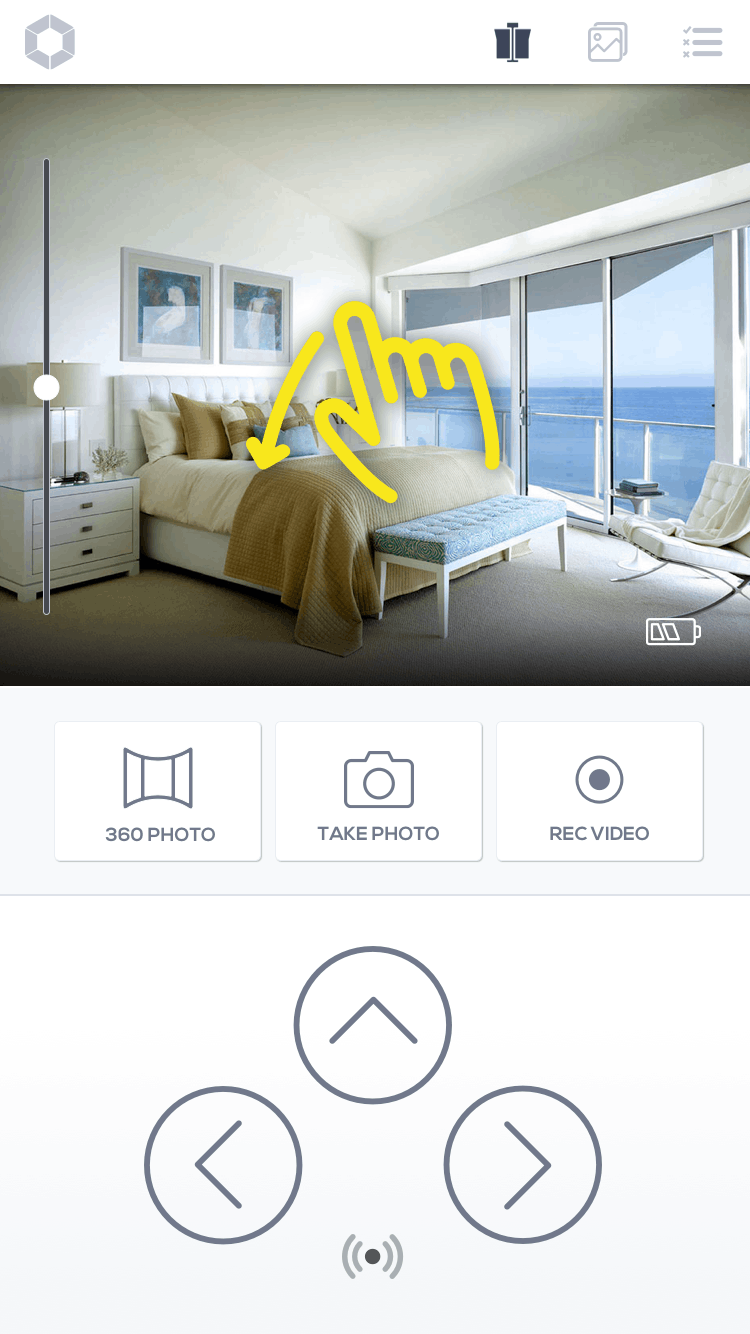
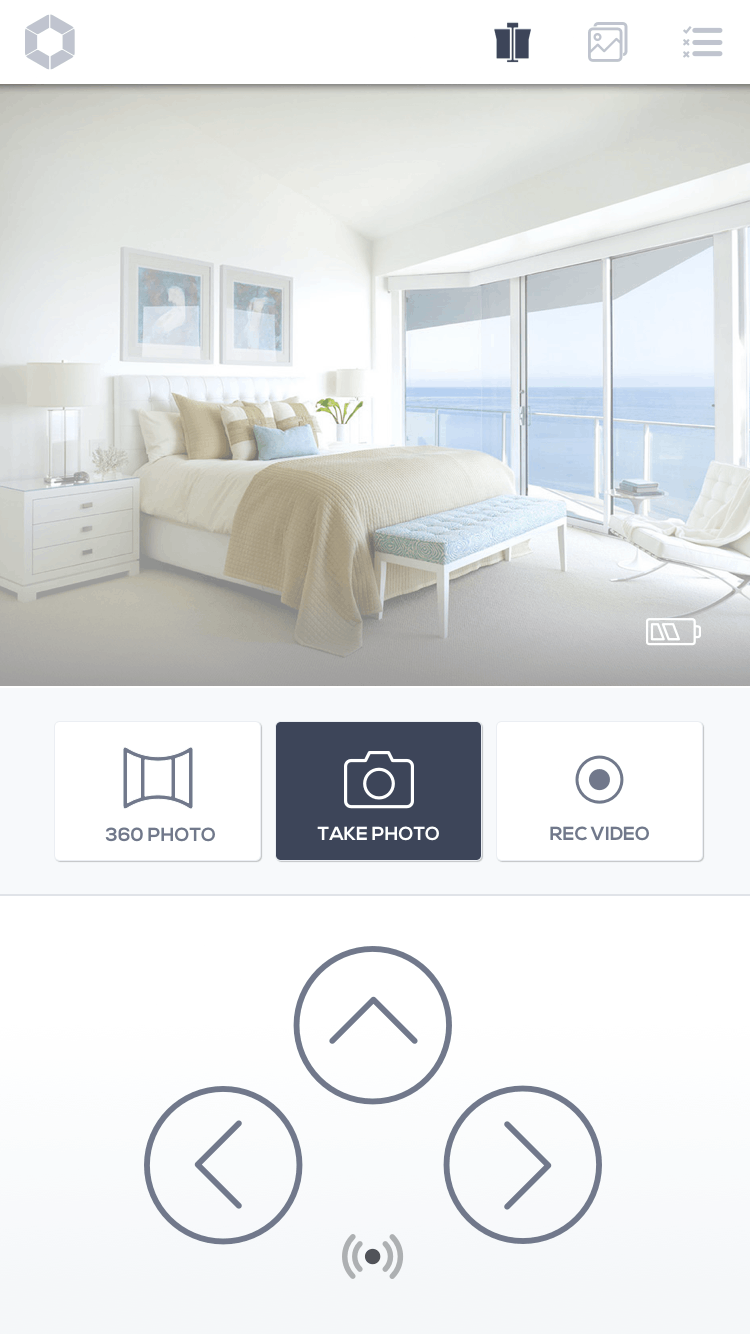
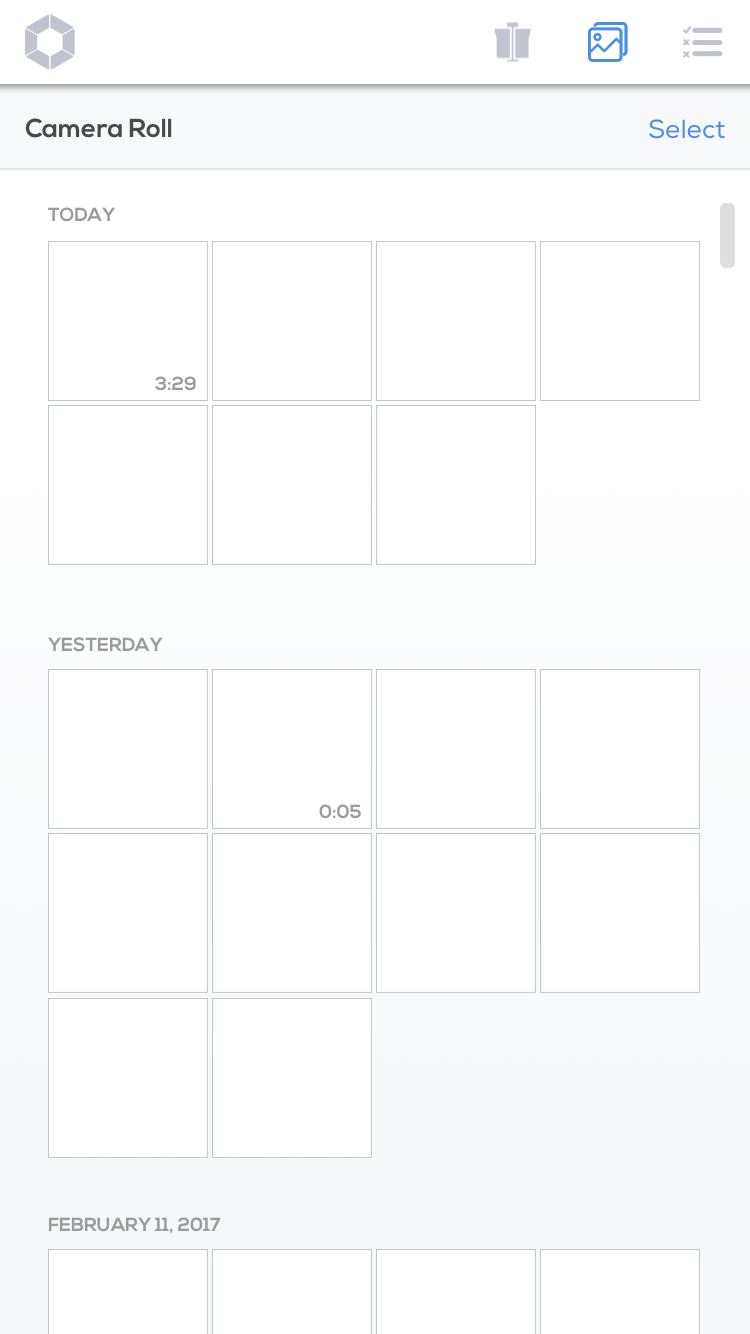
Here are a selection of images from the initial UI concept.


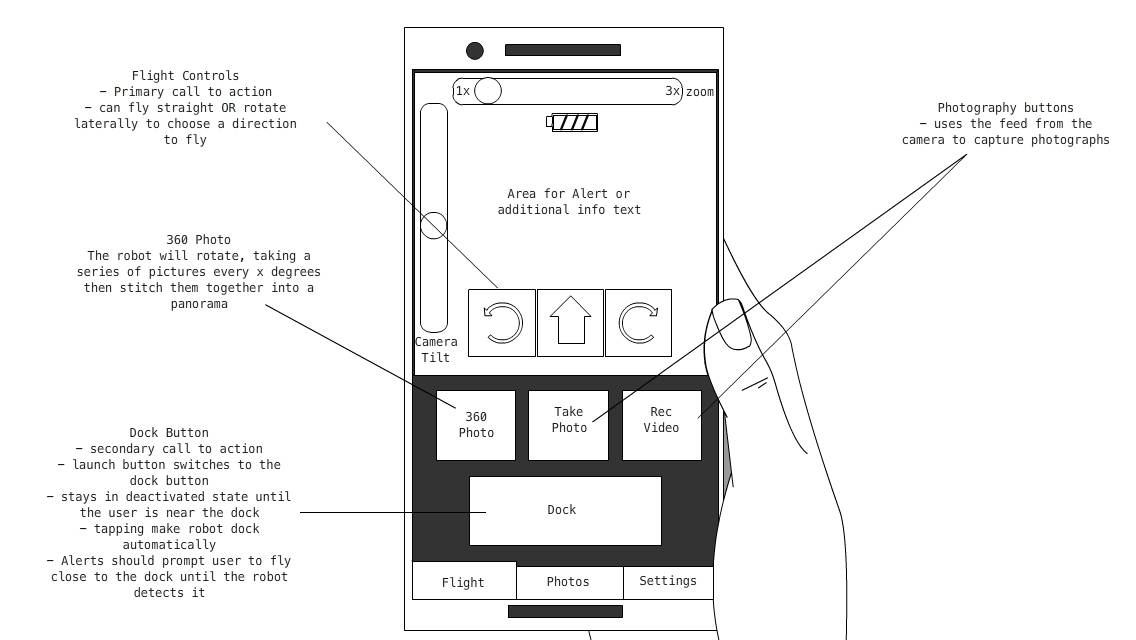
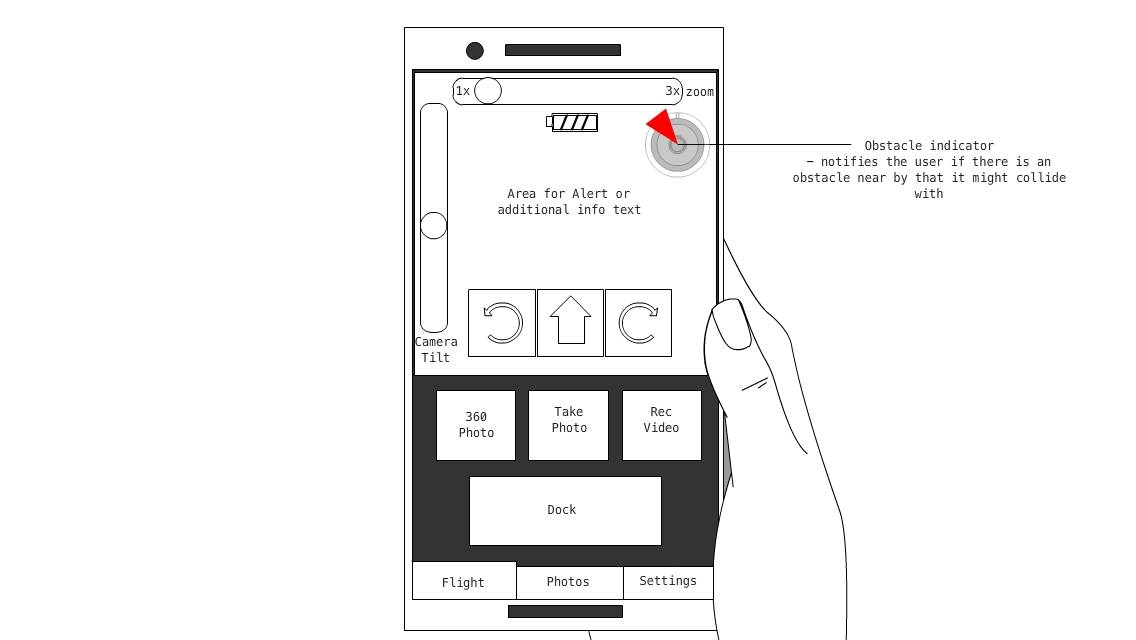


For the VR simulator, we designed the flight controller app at the same time we worked on the actual app design. First we implemented it on a virtual device to get the controls and behaviors right before building the final mobile app that would control the physical drone.

















VIEW MORE PRODUCTS

